 ExpertControl
ExpertControl
ecICP/ecCST讓你變成控制器設計專家
ExpertControl 總部位於德國赫爾辛市 (Herrsching) 的公司, 公司成立以來致力於將複雜的控制理論發展成功能強大且易於使用的工程軟體,供機械、電子、機電整合、水利工程、車輛工程與航太工程領域的工 程師使用。
ExpertControl 的主要產品有:
|
ecICP |
將實驗量測所得到的數據進行系統識別或設計並優化控制器。 |
|
ecCST |
提供控制參數無擾切換( bumpless switching)演算法,工程師可以使用這種演算法在測試期間,切換不同的參數組合以便求得最佳控制狀況,目前 ecCST支援 MAPLE, Simulink, RT-LAB, LabView 與 Infineon C167/ST10 晶片。 |
|
ecTRACE |
支援 Word, Excel, Powerpoint, PDF 與 Simulink 進行需求分析 |
|
ecUTILITIES Toolbox |
支援數據濾波分析 (data filtering)、1-D 與 2-D 數據壓縮,此Toolbox 需在 MATLAB 下使用 |
|
ecSIM |
專門用來執行用 RTW 編譯過後的 Simulink 執行檔(.exe) 的 UI 工具,使用者可以用 ecSIM 來輸入/改 變 Simulink 參數 |
|
ecPlot |
支援工程師於 Simulink 執行期間,同步畫出執行結果 |
|
CARNOT Blockset |
Simulink 的 blockset,可支援 Simulink進行熱動力系統模擬 |
|
ecSTIMlib Blockset |
Simulink 的 blockset,可支援 Simulink 產生複雜的訊號型態。可以使用 RT-Lab 或 dSPACE 的 硬體,即時產生所規劃的訊號 |
|
ecVISION |
Simulink/Stateflow 版本控制,可讓多個 user 同時設計同一個 Simulink 模組 |
|
ecDIFF |
檢查並比較兩個 Simulink model 的差異 |
|
Canbus Toolbox |
Canbus toolbox 可以讓使用者直接在 MATLAB / Simulink 的環境下,存取 CAN卡的資料,CANbus tool 最多可同時支援 10 組 CAN 卡 |
ecICP 的options有:
|
軟體名稱 |
系統識別 |
設計優化控制器 |
產生模型+設計優化控制器 |
|
Standalone |
n.o. |
n.o. |
ecICP |
|
Labview |
IDOCN Classic for Labview |
ACD for Labview |
ecICP |
|
MATLAB |
IDOCN Classic for MATLAB |
ACD for MATLAB |
ecICP |
|
MAPLE |
ICP-M |
ICP-C |
ICP for Maple |
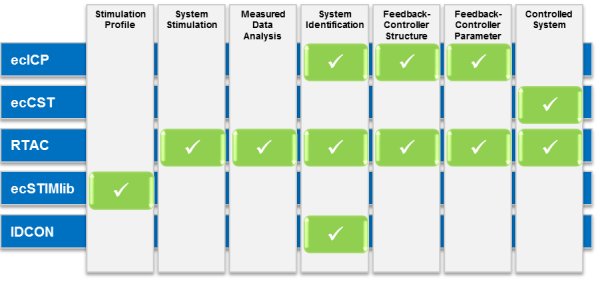
![1 , ecICP_en[1].png](https://www.cadmen.com/Upload/ExpertControl/20110918/2011091803470600251.png)
系統識別和控制器設計工具
--ecICPecICP提供強大且經過實際驗證的可靠方法,提供全自動的模型生成及全系統 參數化。與以往軟體不同的地方在於,使用ecICP您將不需任何理論基礎,可以非常容易地用於廣泛的領域。特別是在有限時間內,需要高度可靠、高品質結果 的情形,更是適合使用ecICP,例如下列應用:截取數據、實驗測量、管理、自動化測試文件、模型、模擬、控制、即時控制、微控制器開發等。
ecICP的優點
- 可與MATLAB相容
- 可讀寫MATLAB相容文件及ASICII數據文件
- 操作簡單、學習容易
- 其方法經實驗證明,十分可靠
- 使用者僅需提供實驗數據的基本訊息及閉迴路轉換時間
- 自動計算控制參數、且可避免積分終結情形
- 以直觀的方式顯示結果
- 無論穩定或不穩定的系統皆可進行控制器設計
- 可以應用於截取數據、實驗測量、控制、模擬等各種領域
閉迴路動態控制
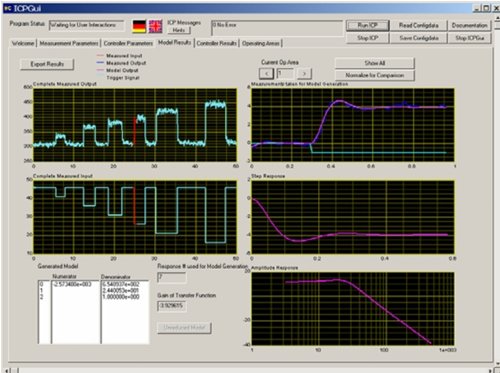
截取量測數據並自動建立模型
主要特點
ICP可以自動設定動態模型、最佳化控制器之結構與參數。模型和控制器的參悟可以直接從測試結果中獲得。控制器的結構以常見的補償模型(PI、PID)為基礎來擴展,並且也考慮了防止積分終結的情況。
ecICP的使用者介面中、對於調建設定的各個步驟都會加以引導。使用者只須進 行下列操作:
- 命名測試文件及其組成
- 根據需要設定模擬範圍
- 閉迴路轉換目標時間設定
- 按ecICP執行按鈕開始模擬
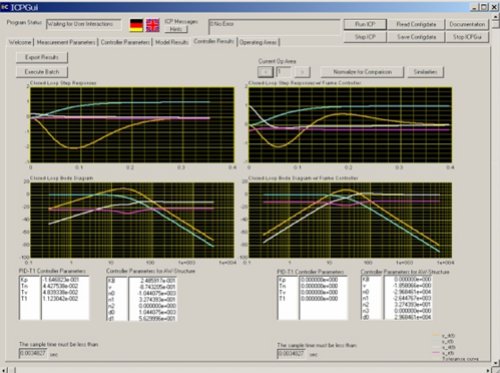
產生出來的控制器及參數可以用於即時或非即時應用的模擬環境。ecICP的豐富 控制演算法,提供控制器參數無衝擊轉換(bumpless transfer)的強大技術,在處理時間及儲存效率上優勢十分顯著,演算法也適用於微控制器。
![2 , ICPCST_Integration[1].png](https://www.cadmen.com/Upload/ExpertControl/20110918/2011091803470604932.png)
使用者
ICP使用非常靈活方便,不須深入的理論背景,較 常使用的有:校準工程師、測試元件工程師、操作員、研發和現場工程師、模型及控制開發工程師。
適用領域
- 各種流體控制
- 電流控制
- 電壓控制
- 壓力控制
- 扭力控制
- 轉速控制
- 散熱、溫度控制
- 速度控制
- 位置控制
適用產業
- 汽車
- 航空
- 電力
- 能源
- 礦業
- 驅動
- 機械
- 水利
- 化學與流程控制
提供獨立模擬Simulink模型的圖形介面-ecSim
主要特點
ecSim讓使用者可以在模型結構樹中瀏覽、修改模型參數, 並可圖型化觀察模擬結果。ecSim更可不需Matlab及Simulink環境即可獨立作業,其模擬過程十分快速,幾乎不占系統資源。
建立獨立系統模擬程序
Real-Time Workshop可協助使用者十分方便地建立系統模擬,只要選擇ecSim中的Real-Time Workshop選項並按下Build按鈕即可。
建立過程會自動進行下列動作:
- 分析模型結構及數據
- 使用Real-Time Workshop的Target語言編輯器從模型產生程式碼
- 整合ecSim配置文件
- 透過make工具在ecSim的makefile控制下建立執行檔
輸出結構樹及參數
Matlab利用ecsexport來分析Simulink模型,顯示所有子系統和可修改的模型參數。
ecSim提供了保護智慧財產權的機制,開發者可以鎖定任何 層次和模型參數。按下Export for ecSim即可導出所有選定的結構樹及參數。
查看結構樹
ecSim提供值觀的圖型用戶介面,方便學習。一個模型可以包含標準標準模型方塊(A)和內嵌子系 統(B)。如果模型或結構樹被解除鎖定,相對應的方塊就會以紅色邊框顯示,雙點圖框內部及可顯示方塊屬性。
同時,結構樹瀏覽器可以顯示整個模型的樹狀結構,並允許直接 選取子系統。但如果使用者試圖打開鎖定的階層,則ecSim會顯示一個警告視窗。
修改模型參數
ecSim允許使用者修改原先定義的模型參數,無需重新編譯即可模擬。參數可以在標準視窗,或 Excel、記事本等外部編輯器中修改。只要雙點方塊的紅色外框內部,可修改的參數就會顯示在標準對話框中。
- 若按下editor-select按鈕,ecSim會輸出所有數據到一個ASCII格式文件,並 啟動編輯工具進行修改。
- 當離開編輯器時,經過修改的數據就會輸入到ecSim。
- 接著便可再次進行模擬。
開始模擬
使用ecSim介面進行模擬時,諸如模擬時間等模擬參數都可 進行修改。ecSim的GUI模擬執行檔也可用於其他方面,開發者甚至沒有設定有效期限之類的限制。
圖型化輸出模擬結果
ecSim提供專業的多視窗模擬結果輸出,並且提供多種選 項。工具中還提供完整、高品質的互動式繪圖功能,使用者可以修改許多參數,包括字體、顏色、標題、座標類型、自動/手動定位等等。
應用領域
ecSim適用於
- 用來解說模擬結果
- 無需Matlab/Simulink,對模型直接進行模擬
- 觀察模型結構樹
- 使用標準對話框或外部編輯器修改模型參數
- 保障智慧財產權
- 再訓練及教學場合對事先準備好的模型進行模擬
優點
- 無需Matlab或Simulink即可獨立進行模擬
- 直觀的介面
- 操作簡單、快速
- 可在常見的圖型化介面中瀏覽模型結構樹
- 內建結構樹瀏覽器
- 修改模型參數後無須重新編譯
- 可用外部編輯器編輯參數
- 模擬結果表示方式十分直觀
- 可以配合使用ecPlot Toolset
ecVERSIM Simulink模型子系統管理與同步開發平台
以 Simulink為開發環境下常遇到的困擾與問題
以model based的開發環境下進行開發工作可以有效降低成本,且同時增加開發的效率。但在開發的過程常會遇到一些讓人感到困擾的問題。例如模型 內部的模塊數量與結構會隨著開發時間而日益龐大且複雜,增加比對開發成效與歷程的困難度。亦或是當模型需要很多領域的工程師進行開發時,很難讓工程師們進 行同步並行開發的工作等等。這些惱人的問題,都能夠透過ecVERSIM獲得解決的方案。ecVRESIM是針對Simulink模型所開發出來的版本管 理系統。其與傳統的版本管理系統最大的差異在於其可針對Simulink子系統進行版本管理的工作。ecVERSIM把每個Simulink子系統視為獨立的模塊,其允許多位工程師同時在不同的Simulink子 系統中進行開發,同時透過強大的歷程紀錄與權限控管,專案經理可以輕鬆掌握並控管專案的開發進度,增加在Simulink環境下的開發效率。其主要功能可 以分成如下所示。
功能1:模型子系統的同步編輯與管理
ecVERSIM可針對mdl檔案中的 子系統進行編輯與管理,使用者可以針對其使用的權限與狀態對子系統進行鎖定,進而對子系統進行專屬的編輯動作,並藉由這個動作讓其他使用者了解目前子系統 的使用情形,如此可以避免開發進度重疊的問題。
功能2:Simulink 模型的版本管理
其可針對各個子系統的開發進度進行管理,每個mdl文件以及其內所包含的子系統均可以任意回碩至開發流程內的任何階段,並完整呈現該階段的開發模型。
功能3:使用者登入權限的設定
ecVERSIM可以定義使用者的權限,就像是Windows的使用權限一樣,可以定義使用者是否可以瀏覽、編輯模型等等的使用權限,提高模型管理的效 能。
ecVERSIM所 帶來的好處
ecVERSIM對需多個工程 師共同開發的大型Matlab / Simulink模型帶來了嶄新的開發環境。透過友善的GUI介面, 可以輕鬆的對大型且複雜的Simulink模型進行管理維護,其 模塊化的體系更允許所有使用者同步對單個大型Simulink進行開發,替工程師們節省下大量的時間。此外,ecVERSIM還具有對文件和子系統的更新、鎖定及使用者個全線管理功能,以往大型Simulink模型常見的問題如各個子系統的合併、模塊還原、集成新模型、找出錯誤位置等,都可以透過ecVERSIM迎刃而解。
直接對Canbus存取數據、感應及監控的工具--CANbus Toolset
CANbus Toolset可以透過Matlab和Simulink模擬環境直接對Canbus做及時的數據存取、感應及監控。基於它提供的各種讀寫功能方 塊,CANbus Toolset能像標準Matlab及Simulink方塊一起在其建模環境中完美地整合。
使用前提
使用CANbus Toolset需要特殊的硬體設備,例如安裝Cancard軟體時須在筆記型電腦中插入PCMCIA卡,在桌上型電腦中插入PCI卡,將即時Canbus 數據耦合至電腦中,如此Simulink才能存取Canbus中的數據。
CANbus Toolset也可以使用USB來存取Canbus,可提供最多十個Canbus通道。
在Matlab中的操作步驟
一般可從Matlab指令視窗或程式介面使用4個功能函數:
|
|
在Simulink中的存取 與建模步驟
存取Canbus的步驟如下:
1. 定義 "To canbus Activities"
為了方便在Simulink中建模,CANbus Toolset提 供如下圖所示定義選單,所有信號都會被Canbus識別器所定義,包含數據及Simulink存取名稱(SAN)。這些數據及字元只 需定義一次,在Simulink建 模與模擬時就不需再關心硬體方面的細節。這個模型可以透過使用者自訂的名稱(SAN)傳回Canbus。
2.Simulink建模
Simulink模型須包含Canbus特性的方塊,這些方塊可以在CANbus Toolset元 件庫"canlib"中 找到,這個元件庫大致包含三個部分:
- ModelControlBlock:每個模型都需使用一次。
- FromCanBlock:從Canbus讀取檔案的方塊,視不同需求可能會在同一個模型中用到多個 這種方塊。
- ToCanBlock:寫入Canbus的方塊,式不同需求可能會在同一個模型中用到多個這種方 塊。
3. 定 義”Canbus Read Activities”
Canbus的讀取功能是由上述方塊提供,再透過Simulink標準地建模方法實現參數化。
4. .開始模擬
上述設定完成後便可開始模擬。下圖表示模型對Canbus的讀寫,以及透過Simulink標準方塊輸 出的訊號。
應用領域
CANbus Toolset可用於各種利用Simulink模擬的環境中:
- 監控Canbus的物理信號
- 演算法開發、系統識別、控制器設計和測試
- 提供經過測試的有效微控制區標準
- 撰寫函數原型
優點
- 方便操作與使用
- 可直接在Matlab中使用
- 可直接在Simulink中使用
- 一般桌上型甚至筆記型電腦即可使用
- 符合工業標準且可透過USB傳輸的Canbus硬體
- 可在Simulink直接做即時模擬
若需要進一步資料請聯繫



